Aihe
Tutustutaan kaksiulotteiseen Fouriermuunnokseen. Fouriermuunnos on erinomainen matemaattinen työkalu, jonka avulla voidaan kattavasti ymmärtää monia konenäön ongelmia. Toisaalta, Fouriermuunnos, ja erityisesti sen diskreetti ja nopea versio, fast fourier transform (FFT), on hyödyllinen myös käytännöllisenä menetelmänä.
Tämän tutoriaalin aikana ymmärrämme mistä konvoluutio-operaatio on peräisin ja sen miten näytteistetty signaali käyttäytyy ja osaamme muuttaa kuvien kokoja oikein.
Siirtoinvariantit lineaariset systeemit
Useimmat kuvantamisjärjestelmät ja -systeemit käyttäytyvät pitkälti siten, että niillä on kolme tärkeää ominaisuutta:
Superpositioperiaate: Oletetaan, että \(R( f + g) = R( f ) + R(g)\) eli syötteiden summan vaste on erillisten vasteiden summa.
Skaalautuvuus: Nollasyötteen vaste on nolla, ja skaalatun syötteen vaste on skaalattu versio alkuperäisen syötteen vasteesta, eli \(R(k f ) = kR( f )\) Systeemi joka toteuttaa superpositioperiaatteen ja on skaalautuva on lineaarinen.
Siirtoinvarianttius: Siirtoinvariantissa systeemissä vaste siirrettyyn syötteeseen on alkuperäisen syötteen vasteen vastaava siirtymä. Kameran tapauksessa tämä tarkoittaa yksinkertaisesti esimerkiksi sitä, että jos keskelle kameran näkökenttää asetettu pieni valopiste näkyy kameran ottamassa kuvassa keskellä kuvaa kirkkaana läiskänä, ja valopistettä siirretään reunaa kohti, tulisi kuvassa näkyä edelleen sama läiskä siirtyneenä.
Laitetta, järjestelmää tai systeemiä joka on lineaarinen ja siirtoinvariantti kusutaan lineaariseksi siirtoinvariantiksi laitteeksi, järjestelmäksi tai systeemiksi. Tässä on tärkeää on se, että lineaarisen siirtoinvariantin systeemin vaste annettuun syötteeseen saadaan määrättyä konvoluution avulla. Tämä seikka todennetaan systeemeille, joiden syötteet ja vasteet ovat diskreettejä (lukuvektoreita tai taulukkoja).
Tehtävä
- Osoita, että konvoluutio on siirtoinvariantti
- Osoita, että konvoluutio on skaalautuva
Diskreetti konvoluutio
Tarkastellaan tilannetta ensin yksiulotteisessa tapauksessa ja oletetaan, että on annettu lineaarinen siirtoinvariantti systeemi jonka syötteet ja vasteet ovat vektoreita ja oletetaan myös että syöte- ja vastevektorit sisältävät (numeroituvasti) äärettömän määrän alkioita. Täten voidaan toistaiseksi välttää pienet tarkennusta vaativat seikat syötteiden ja vasteiden alku- ja loppukohdissa. (Ks. Edellinen tutoriaali ja reunailmiöt)
Yksiulotteinen diskreetti konvoluutio
Oletetaan, että on annettu syötevektori \(f\) , joka on ääretön ja indeksoitu kokonaisluvuilla (eli on olemassa \(-1\):s alkio jne.) ja jonka \(i\):nnettä alkiota merkitään \(f_i\):llä, \(i = \dots − 2, −1, 0, 1, 2 \dots\). Syötevektori \(f\) voidaan esittää painotettuna summana kantavektoreista. Sopivat kantavektorit ovat sellaisia, joiden yksi alkio on arvoltaan 1 muiden ollessa arvoltaan 0. Merkitään \(ei = \dots 0, 0, 1, 0, 0 \dots\) joka on siis vektori jonka alkio \(i\) on 1 muiden alkioiden ollessa 0.
Määritellään seuraavaksi siirto-operaattori \(\text{Shift}( f , i)\), joka palauttaa vektorin jonka \(j\):s alkio on vektorin \(f\) alkio \(j−i\): \(\text{Shift}(f , i) j = f(j−i)\). Esimerkiksi vektorin \(\text{Shift}(e_0 , 1)\) alkio numero 1 on 1, ja muut alkiot ovat nollia. Siirto-operaattorin avulla vektori \(f\) voidaan esittää kantavektorin \(e_0\) avulla seuraavasti:
\(f = \sum_i f_i(\text{Shift}(e0 , i)\).
Merkitään lineaarisen siirtoinvariantin systeemimme vastetta syötevektoriin f merkinnällä \(R( f )\). Koska systeemi on siirtoinvariantti, täytyy olla voimassa
\(R(\text{Shift}( f , k)) = \text{Shift}(R( f ), k)\),
ja lisäksi koska se on lineaarinen on voimassa
\(R(k f ) = kR(F)\) \(R( f + g) = R( f ) + R(g)\).
Nämä seikat yhdessä tarkoittavat sitä, että
\(\begin{align*} R( f ) &= R\left(\sum_i f_i \text{Shift}(e_0, i)\right) \\ &= \sum_i R(f_i \text{Shift}(e_0, i)) \\ &= \sum_i f_i R(\text{Shift}(e_0, i)) \\ &= \sum_i f_i (\text{Shift}(R(e_0), i)) \end{align*}\)
Tästä seuraa, että voimme määrätä systeemin vasteen mihin tahansa datavektoriin \(f\) , kunhan vain tunnemme sen vasteen vektoriin \(e_0\) . Tätä vastetta \(R(e_0)\) kutsutaan yleensä systeemin (yksikkö)impulssivasteeksi. Yksikköimpulssivasteita mitataan monista laitteista. Näitä mm. kultakorvahifistit tutkailevat tarkasti vahvistintestiraporteista ja päättelevät laitteen sopivuutta oman laitteiston osaksi.
Merkitään nyt systeemin yksikköimpulssivastetta \(g = R(e_0)\). Nyt siis
\(R( f ) = \sum_i f_i \text{Shift}(g, i) = g ∗ f\).
Tämä määrittää yksiulotteisen diskreetin konvoluutio-operaation, jota merkitään operaattorisymbolilla \(∗\). Jos tarkastellaan vasteen \(R( f )\) alkiota \(j\), saadaan lauseke
\(R( f ) j = \sum_i g_{j−i} f_i\),
joka on analoginen aiemman kaksiulotteisen konvoluutiolausekkeen kanssa, ja itse asiassa selittää sen alkuperän. Lineaarisen siirtoinvariantin systeemin vaste syötteeseen saadaan siis konvoluutio-operaatiolla syötteestä ja systeemin yksikköimpulssivasteesta.
Kaksiulotteinen diskreetti konvoluutio
Tässä tapauksessa sekä syöte että vaste ovat äärettömiä kaksiulotteisia taulukoita, joiden rivejä ja sarakkeita indeksoidaan kokonaisluvuin. Merkitään tällaisen taulukon \(F\) alkiota \(i, j\) F(i, j):llä. Kaksiulotteisessa diskreetissä tapauksessa yksikköimpulssi on ääretön taulukko E, jonka alkiot ovat kaikki nollia paitsi \(E(0,0) = 1\). Jos \(G = R(E)\) on systeemin \(R\) yksikköimpulssivaste, johtaa vastaava päättely kuin edellä yksiulotteisessa tapauksessa tulokseen, jonka mukaan systeemin vaste syötteeseen F on
\(\left[R(F)\right](i, j) = \sum_{u,v} G_{i−u,j−v} F_{u,v} = G ** F = G * F.\)
Merkinnällä ** täsmennetään kyseessä olevan kaksiulotteinen konvoluutio-operaatio, silloin kun on epäselvyyttä käsitelläänko yksi, vai kaksiulotteisia signaaleja.
Fourier muunnos
Edellä käytettiin temppua, jossa signaali \(f(x, y)\) esitettiin painotettuna summana hyvin suuresta (tai äärettömästä) määrästä hyvin pieniä (tai äärettömän pieniä) laatikkofunktioita. Tämä tapa korostaa ajatusta siitä, että signaali on vektoriavaruuden alkio, eli vektori. Laatikkofunktiot muodostavat erään kannan tähän vektoriavaruuteen ja painokertoimet muodostavat vektorin alkioittaisen esityksen tässä “laatikkokannassa”. Tarvitsemme vielä uuden työkalun käsitelläksemme jäljellä olevat kaksi avointa kysymystä:
Vaikka onkin selvää, ettei kuvan diskreetti pikselirepresentaatio voi sisältää jatkuvan kuvasignaalin kaikkea informaatiota, emme vielä tiedä mikä osa informaatiosta katoaa.
On myös selvää, ettemme voi tiputtaa diskreetin pikselirepresentaation re- soluutiota yksinkertaisella tavalla ottamalla mukaan vain joka k:nnen pikselin (shakkilaudan kuvasta voisi tulla kokomusta tai kokovalkoinen). Kuinka resoluutiota sitten turvallisesti ja minimivahingoin pudotetaan?
Nämä molemmat avoimet ongelmat liittyvät kuvasignaalissa esiintyviin nopeisiin muutoksiin. Esimerkiksi resoluution pudottaminen alkeellisesti saattaa hukata nopeita vaihteluita, koska ne tapahtuvat matalaresoluutioversioon valittujen pikselien välisessä osassa alkuperäistä dataa.
Koska voimme tulkita kuvasignaalimme vektoriavaruuden alkioina, voimme myöskin tehdä vektoriavaruuteen kannanvaihdon, ja tutkia saman signaalin esitystä uudessa kannassa. Sopiva uusi kanta koostuu jatkuvassa tapauksessa äärettömästä määrästä eri suuntiin etenevistä ja eri taajuisista sinitasoaalloista. Kun signaali esitetään tällaisessa kannassa, on nopeasti muuttuva informaatio helppo havaita, sillä korkeataajuisia tasoaaltokantavektoreita vastaavat signaalivektorin alkiot ovat tällöin suuria. Palautetaan mieliin siis Fouriermuunnoksen perusteet signaalinkäsittelyn kurssilta, ja päivitetään tiedot kaksiulotteiseen tapaukseen.
Eri suuntaan eteneviä, eri taajuuksisia siniaaltoja (ks.koodi)
Yksiulotteisessa tapauksessa diskreetti fouriermuunnos kuvaa (yksiulotteisen, diskreetin) signaalin aika-avaruudesta taajuusavaruuteen,
\(\left[F(x)\right](k) = \sum_{n=0}^{N-1} x(n) \cdot e^{-i 2 \pi \frac{k}{N} n}\),
ja vastaava käänteismuunnos,
\(\left[F^{-1}(x)\right](n) = \frac{1}{N} \sum_{k=0}^{N-1} \left[F(x)\right](k) \cdot e^{+i 2 \pi \frac{n}{N} n}\)
palauttaa signaalin aika-avaruuteen.
Kuvien tapauksessa kyseessä on kaksiulotteinen signaalin muunnos, jolloin puhumme aika-avaruuden sijaan tila-avaruudesta (engl. spatial domain). Kuvan fouriermuunnos voidaan määritellä helposti 1D-signaalin muunnoksen kautta: Kiinnitetään ensin x-koordinaatti ja lasketaan fouriermuunnos y:n suhteen, jolloin saadaan sarakkeittainen fouriermuunnos. Tämän jälkeen suoritetaan 1D muunnokset x:n suhteen, ja lopputuloksena saadaan koko kuvan fourier muunnos.
\(\left[F_{2D}(I)\right](x,y) =\sum_{i=0}^{W-1} \left(\sum_{j=0}^{H-1} I(x,y) \cdot e^{-i 2 \pi \frac{j}{N} n}\right) \cdot e^{-i 2 \pi \frac{i}{N} n} = \sum_{i=0}^{W-1} \sum_{j=0}^{H-1} I(x,y) \cdot e^{-i 2 \pi\left(\frac{kx}{W}+\frac{yj}{H}\right)}\),
Samoin kuin yksiulotteisella, niin myös kaksiulotteisella fouriermuunnoksella on monia näppäriä ominaisuuksia, esimerkiksi (Todistukset signaalinkäsittelyn kurssilla):
| Kaava | Tila- | Taajuusavaruus |
|---|---|---|
| Yksikköimpulssi | \(\delta(x,y)\) | \(1\) |
| x-derivaatta | \(\frac{df}{dx}(x,y)\) | \(x\left[\mathcal{F}(f)\right](x,y)\) |
| y-derivaatta | \(\frac{df}{dy}(x,y)\) | \(y\left[\mathcal{F}(f)\right](x,y)\) |
| laatikkofunktio | \(\text{box}_1(x)\text{box}_1(y)\) | \(\frac{\sin(\pi u)}{\pi u} \frac{\sin(\pi v)}{\pi v}\) |
| exponenttifunktio | \(e^{-\pi(x^2+y^2)}\) | \(e^{-\pi(x^2+y^2)}\) |
| konvoluutioteoreema | \(\left[f*g\right](x,y)\) | \(\left[\mathcal{F}(f)\mathcal{F}(g)\right](u,v)\) |
Näistä tärkein lienee viimeinen muunnospari, jota kutsutaan konvoluutioteoreemaksi ja sen avulla voidaan laskea tehokkaasti suuria konvoluutioita.
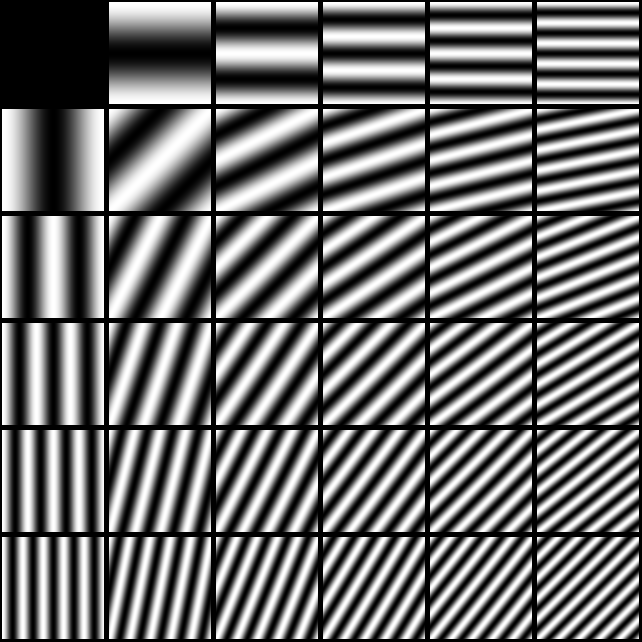
Tehtävä - Erilaisten kuvien Fouriermuunnoksia
Tarkastellaan joidenkin yksinkertaisten funktioiden kosinimuunnoksia. Alla oleva ohjelma generoi ja piirtää kuvia, jotka on sämplätty erilaisista yksinkertaisista funktioista.

import WebTools
import CV.DFT
import CV.Pixelwise
import CV.ColourUtils
import CV.ImageMathOp
import CV.Transforms
piirraDFT = logarithmicCompression . fst . dftSplit . dft
main = webCreate "kosiniviivat" $ montage (2,7) 5
[
g (50,50), piirraDFT (g (50,50))
, g (30,30) #+ g (70,70), piirraDFT (g (30,30) #+ g (70,70))
,kosinix, piirraDFT kosinix
,kosiniy, piirraDFT kosiniy
,vino, piirraDFT vino
,ikkunoitu, piirraDFT ikkunoitu
,kiekko, piirraDFT kiekko
]
where
koko@(lev,kor) = (100,100)
kiekko,kosinix,kosiniy,vino :: Image GrayScale D32
g :: (Int,Int) -> Image GrayScale D32
g (u,v)= imageFromFunction koko (\(x,y) -> exp(-0.02*(fromIntegral (x-u)**2
+ fromIntegral (y-v)**2)))
kosinix = imageFromFunction koko (\(x,y) -> cos (0.5*fromIntegral x))
kosiniy = imageFromFunction koko (\(x,y) -> cos (0.5*fromIntegral y))
vino = imageFromFunction koko (\(x,y) -> cos (0.2*fromIntegral (x+y)))
kiekko = imageFromFunction koko (\(x,y) -> if ((x-lev`div`2)^2 + (y-kor`div`2)^2) < 350
then 1 else 0)
ikkunoitu = imageFromFunction koko (\(x,y) -> hann (x,y) * cos (0.2*fromIntegral (x+y)))
hann (x,y) = 0.5 * (1-cos(2*pi*fromIntegral x/(fromIntegral lev-1)))
* (1-cos(2*pi*fromIntegral y/(fromIntegral kor-1)))- Selitä, miksi edellisten kuvien fouriermuunnos on sellainen kuin se on.
Tehtävä - Suodatus fouriermuunnoksella
Seuraavaksi tarkastellaan millaisia operaatioita fouriermuunnoksen avulla on helppo määritellä. Esimerkiksi siloitusoperaatio voitaisiin nähdä siten, että kuvasta poistetaan kaikki korkean taajuuden komponentit.
- Selvitä, mitä kuvalle tapahtuu, kun seuraavia operaatioita sovelletaan kuvan fouriermuunnokseen.
- \(\left[A f\right](x,y) = \begin{cases} f(x,y) & \text{, jos } ||x-y||<30 \\ 0 & \text{, muuten} \end{cases}\)
- \(\left[B f\right](x,y) = \begin{cases} f(x,y) & \text{, jos } ||x-y||>30 \\ 0 & \text{, muuten} \end{cases}\)
- Seuraavassa kuvassa esitetään pahasti pilalle mennyt kuva. Käytä fourieranalyysiä ja palauta se mahdollisimman ennalleen:

import WebTools
import CV.Filters
import CV.Matrix as M
import CV.ColourUtils
main = web "aallot" "images/FourierSmall.jpg" f
where
f :: Image GrayScale D32 -> Image GrayScale D32
f kuva = stretchHistogram (remapImage corrupt kuva)
corrupt f (x,y) = f (x,y) + sin(7*fromIntegral x + 5*fromIntegral y)
- sin(0.1*fromIntegral x - 0.3*fromIntegral y)Esimerkki: silmälasien välttämättömyys
Konvoluutioteoreeman ja toiseksi viimeisen taulukkorivin muunnosparin avulla saamme idealisoidun matemaattisen todistuksen sille miksi silmälasit ovat välttämättömät taittovirheestä kärsiville! Taittovirheen takia kohde ei tarkennu täsmälleen verkkokalvolle vaan se tarkentuu joko verkkokalvon eteen tai taakse. Kummassakin tapauksessa yksittäinen piste projisoituu verkkokalvolle kiekoksi, jota tässä approksimoidaan laatikkofunktiona.

Hajataitto
Taittovirheinen silmä on siis tässä eittämättä hieman keinotekoisessa esimerkissä lineaarinen siirtoinvariantti systeemi, jonka hypoteettinen yksikköimpulssivaste on \(g(x, y) = R(\delta(x, y))= \text{box}_1 (x) \text{box}_1 (y)\). Systeemin vaste syötteeseen saatiin yksikköimpulssivasteen ja syötesignaalin \(f (x, y)\) konvoluutiona. Konvoluutioteoreeman mukaan vastaava tulos saadaan kertomalla syötteen Fourier-muunnos yksikköimpulssivasteen Fourier-muunnoksella ja ottamalla tuloksesta käänteismuunnos
\(\begin{align*} f(x, y)∗∗g(x, y) &= F^{-1} \left(\left[F f\right](x,y))\left[F g\right](x, y)\right) \\ &= F^{-1} \left(\left[F f\right](x, y) \frac{\sin(\pi u)}{\pi u} \frac{\sin(\pi v)}{\pi v}\right). \end{align*}\)
Koska funktio \(\sin(x)/x\) saa arvon \(0\) kun \(x = \dots − 2 \pi, −\pi, \pi, 2\pi \dots\) kuvautuu osa alkuperäisen signaalin Fourier-kertoimista nollaksi. Tämä on peruuttamaton vahinko, sillä alkuperäistä informaatiota ei voi enää tämän jälkeen palauttaa takaisin.
Esimerkki (Tähti): CSI-jekku
Jos silmälasit ovat välttämättömiä, niin onko mitään tehtävissä, jos kuvaan on eksynyt sumentumaa? Ehkäpä vähän, sillä jos tiedämme tai arvaamme, että on sumentuman yksikköimpulssivaste on \(S\), niin silloinhan pätee
\(I_\text{havainto} = I_\text{Oikea}**S\)
jolloin konvoluutioteoreeman nojalla,
\(F(I_\text{havainto}) = F(I_\text{Oikea})F(S)\)
mikä voidaan jakaa alkioittain \(F S\):llä,
\(F(I_\text{havainto})/F(S) = F(I_\text{Oikea})\)
ja kaavan oikealle puolelle jää mukavasti alkuperäinen kuva. Tässä on tietysti se ongelma, että oletamme, että \(F S\) on kaikkialla jotain muuta kuin nolla, mitä se ei useinkaan ole (ks. ed. esimerkki). Voimme kuitenkin määritellä estimaatin \(S^-1_\text{est}\)
\(S^{-1}_\text{est}(u,v) = \begin{cases} 1/\left[F(S)\right](u,v) & \text{jos } |\left[F(S)\right](u,v)| > t \\ 0 & \text{muuten} \end{cases}\)
minkä jälkeen
\(F(I_\text{est}) = F(I_\text{Havainto})(S^{-1}_\text{est})\)
ja
\(I_\text{est} = F^{-1} (F(I_\text{Havainto})S^{-1}_\text{est})\).
Hetken puuhastelu paljastaa nopeasti, että tämä toimii melkein kuin CSI:ssä, jos valitsee kuvan ja sumentuman oikein, ja aika kehnosti lähes kaikissa käytännön tilanteissa.
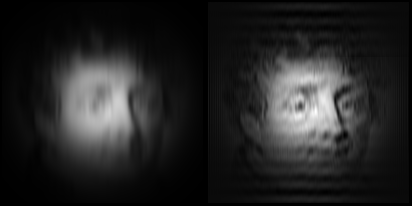
CSI on paljastanut syyllisen: J.Fourier
Tehtävä: Turhaudu CSI jekkuun
- Edellä herra fourier epäsumennettiin tällä ohjelmalla. Saatko säädettyä siihen sopivan yksikköimpulssivasteen, että seuraava matemaatikko saadaan selvennettyä?

Alfred Haar


